

本期概述
卡尔曼滤波器的含金量还在不断上升!
状态预测公式
我们假设在道路上有一辆小汽车在行驶,他现在时刻的状态矩阵简单由位置和速度来表示:

欢迎加入自动驾驶实战群

那么位置以及速度就不难推导:
其中,是当前车辆的加速度(理解为给的油门,表示线性系统的控制量)。
由于卡尔曼滤波器是一个线性滤波器,所以我们可以用矩阵来表示上面这个方程组:
一切都很简单对嘛!现在再用一个简单的字母去代替矩阵,替换公式为:
最后代入,恭喜~我们得到了卡尔曼滤波器的第一个公式,状态预测公式:
是状态转移矩阵,表示从上一时刻的状态推导至当前时刻状态。
是控制矩阵,表示当前的控制量如何作用于当前时刻状态
那我问你,为啥的头顶为啥尖尖的呢?

这个表示状态是预测得到的,并非实打实的真实值!同时,还有一个?上标,这表示这个值不能直接使用,下面我们会要对他增加一些修正。
协方差矩阵
真实的世界并非是0和1的,一定会有0-1的叠加态,即”不确定”的情况。我们的观测很有可能带有噪声,噪声越大,这种”不确定”就越强。

假设蓝色是采样点,噪声是x,y两个方向上提供的,再加上两个噪声有可能耦合,这几个参数共同组成了噪声协方差矩阵
同时,不同的噪声很有可能互相耦合,为了表达不同噪声之间的相关性,就有了协方差矩阵:
矩阵的对角线元素表示状态变量 估计值的不确定性或误差方差。方差越大,表示对该状态的估计越不确定。
矩阵的非对角线元素表示状态变量之间的相关性。如果两个变量的误差高度相关,这个协方差值就会很大。
协方差矩阵的传递
根据协方差矩阵的性质(这里不再证明):
再把上面计算得到的状态预测公式带入,就有协方差矩阵传递公式的简单形式:
但是由于我们的预测模型仍然有不确定性,所以加一个尾巴加以修正:
我们得到了第二个公式。
观测矩阵
观测矩阵把系统的内部状态(通常是难以直接测量的变量)转换成能够被传感器测量的形式,将系统的状态向量 映射到观测空间的矩阵。
卡尔曼滤波器的数据融合功能就是从这里实现的。
简单来说,观测矩阵 用于从状态向量中提取出我们能直接测量的部分。
例如,小汽车的位置以及速度都是状态量,但是我们的传感器(假设为RTK)只能给出位置的测量值,那么观测矩阵就会将状态矩阵中的干掉:
最后,由于观测也并非完全可靠,所以加上一个补偿:
状态更新
还记得嘛,我们说还有一个?上标,需要加上补偿量才可以使用!
啥是补偿量呢?
就是评估预测值与实际观测值之间的偏差!考虑上实际观测后,状态矩阵可以去掉?上标,使其更加接近实际观测值:
这里又引入了一个卡尔曼系数,推导它是一个复杂的事情,我们先记住他的表达:
卡尔曼系数的作用相当于一个权衡值,如果模型更相信预测值,则会比较小;如果模型更相信测量值,则会比较大。
NOTE:卡尔曼系数还会把测量的残差从观察域转换回状态域,和观测矩阵的作用相反。
噪声协方差矩阵的更新
这个是留给下一轮迭代时使用的。
表示了如何将卡尔曼增益应用到预测误差协方差上。
同样,在较大时,系统对观测数据更为信任,更新的协方差矩阵会变得较小,表示系统对状态的估计更精确;反之,则会变得较大,表示不确定性增加。
总结
我们得到了所有的五个公式

预测公式:
更新公式:
最后总结一下整体流程:
1.初始化:
给定初始状态估计 和初始估计误差协方差矩阵 。
2.预测阶段:
预测当前时刻的状态 。
预测当前时刻的误差协方差矩阵 ,其中 是过程噪声协方差矩阵。
3.更新阶段:
计算卡尔曼增益 ,其中 是观测噪声协方差矩阵。
更新状态估计。
更新估计误差协方差矩阵。
实验
这个图片是李小毛从网络上扒下来的!
 数据来源: https://www.bilibili.com/video/BV1vs411z7PX
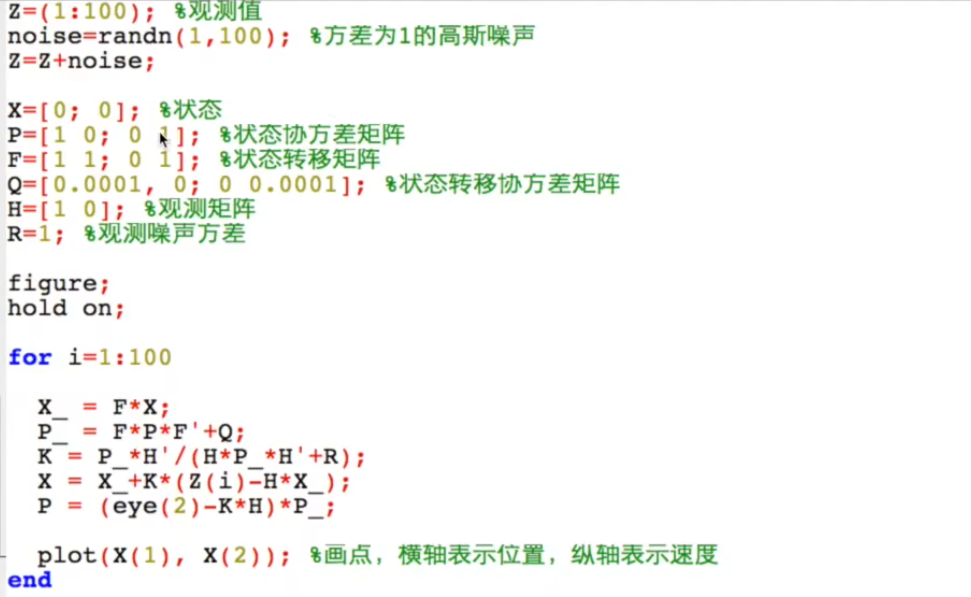
数据来源: https://www.bilibili.com/video/BV1vs411z7PX这个实验中,车辆从1运动到100,速度为1m/s,每1s采样一次,观测噪声为1的高斯噪声。
X:系统的状态向量,包含位置和速度。初始化时,假设物体的初始位置和速度都是 0。
P:状态协方差矩阵,表示对状态估计的不确定性。在初始时,位置和速度的估计不确定性是 10。
F:状态转移矩阵。在这个例子中,假设位置随时间增加(假设速度是恒定的),所以位置和速度的状态转移矩阵是这样设定的。
Q:过程噪声协方差矩阵,表示系统动态过程中的噪声影响。在这个程序中,假设过程噪声是很小的,因此设置一个非常小的值。
H:观测矩阵,它将系统的状态(位置和速度)映射到观测空间。由于程序中的观测值 Z 只包含位置,因此观测矩阵只有对位置的映射。
R:观测噪声协方差矩阵,描述观测数据中噪声的大小。在这里,设定为 1,表示观测值的噪声是单位方差的高斯噪声。
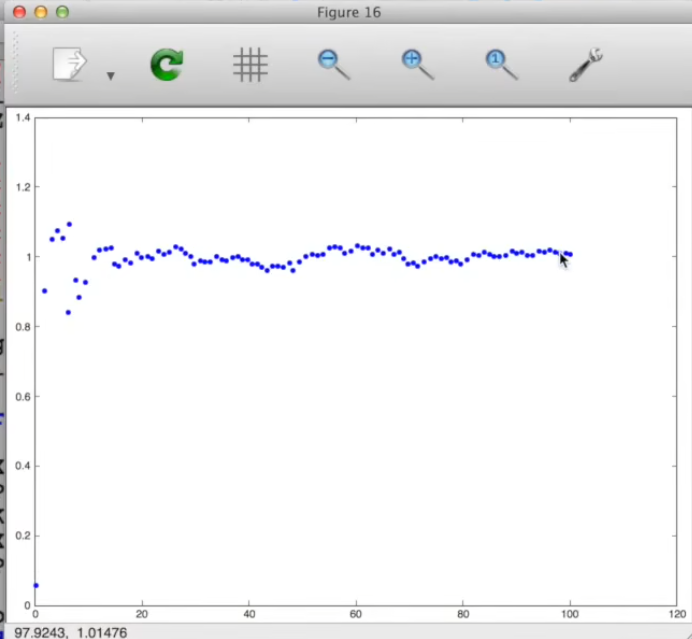 实验作图
实验作图
最后别忘了,帮忙点“在看”。
您的点赞,在看,是我创作的动力。
AiFighing是全网第一且唯一以代码、项目的形式讲解自动驾驶感知方向的关键技术。
长按扫描下面二维码,加入知识星球。
